
Wenn Mensch und Maschine eins werden
Space Justin und sein Teleoperator warten Satelliten
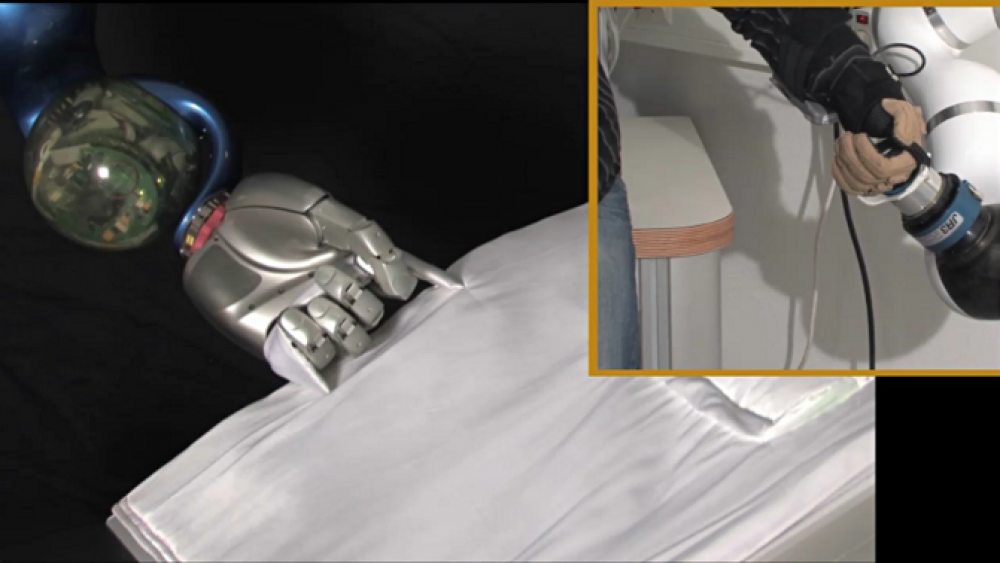
Space Justin ist ein Roboter, der im Deutschen Forschungszentrum für Luft- und Raumfahrt DLR dafür entwickelt wird, den Menschen telepräsent agieren zu lassen. Ziel ist es, dass solche Mensch-Maschine-Systeme künftig Satelliten in Umlaufbahn reparieren und warten können. Die besonderen haptischen Fähigkeiten seiner anthropomorphen Hände lassen sich vom Telemanipulator aus so wahrnehmen und steuern, als ob er selbst vor Ort wäre. Zudem ist der Roboter aber auch mit autonomer Intelligenz für das selbständige Erkennen von Objekten ausgerüstet, so dass er Teilaufgaben auch selbst ausführen kann.
Link-Empfehlungen der Redaktion zu weiterführenden Informationen:
– Weitere Informationen zu den anthropomorphen Händen des DLR-Roboters in unserer Reportage „Justin macht Tee“ – hier
– Webseite über Telepräsenz-Forschungen im DLR-Institut für Mechatronik – hier
Mehr zum Inhalt des Videos:
Die Telepräsenz erfordert mehrere Elemente. Damit der Mensch in den entfernten Roboter „schlüpfen“ kann, benötigt er eine Datenbrille mit einem Trackingsystem für die Kopfbewegungen, magnetische Sicherheitsmanschetten, über die er die Haptik, also das Druckempfinden, des in der Entfernung agierenden Roboters übertragen bekommt und schließlich die Datenhandschuhe, die über Sensoren die genaue Position der Finger erfassen. Und dann braucht es das menschliche Pendant – einen Roboter, der nicht nur sehen, sondern mit seinen anthropomorphen Händen auch genau fühlen kann.
Für die Mensch-Maschine-Schnittstelle ist diese Kraftrückkoppelung die wichtigste Eigenschaft. Bei Weltraumeinsätzen spielt für die Telepräsenz die Laufzeit der Signale eine große Rolle. Denn zwischen Teleoperator und dem im Weltraum agierenden Roboter liegen hunderte, tausende oder zehntausende von Kilometern. Auch die Übertragung über Relais-Satelliten kann die Laufzeit der Signale deutlich erhöhen. Wird sie zu groß, dann kollidiert die Wahrnehmung zwischen den selbst ausgeführten Bewegungen des Menschen mit den Rückmeldungen der Bewegungen des Roboters. Experten im DLR haben einen neuen Regelungsansatz entwickelt, der das System stabilisiert. Das beeinflusst jedoch die Handhabung für den Teleoperator. Je größer der Laufzeitunterschied ist, desto schwieriger wird die Manipulation. Tests mit Versuchspersonen haben ergeben, dass die Telemanipulation bis zu Laufzeitunterschieden von etwa 800 Millisekunden möglich ist. Damit lassen sich Reparatureinsätze bis zum geostationären Orbit durchführen.
© mce mediacomeurope GmbH 2013
