
Roboter lernen Laufen
Humanoide Laufwerkzeuge – Trendforschung in der Robotik
Roboter haben das Laufen gelernt. Hyperraum.TV stellt drei besonders attraktive Exemplare dieser neuen humanoiden Spezies vor: Hondas Asimo, einen der ältesten Zweibeiner, das Soft-Robotic-Laufwerkzeug des Deutschen Zentrums für Luft- und Raumfahrt in Oberpfaffenhofen sowie den Superläufer RunBot vom Bernstein Center for Computational Neuroscience aus Göttingen.
Seit den achtziger Jahren versuchen sich Robotik-Spezialisten darin, das menschliche Gehen zu analysieren und nachzubilden. Es dauerte viele Jahre, ehe Forscher das Laufen auf zwei Beinen nachbilden konnten. Inzwischen ist das Ziel der Herstellung von humanoiden Service-Robotern in erreichbare Nähe gerückt. Will man Roboter im menschlichen Umfeld einsetzen, sind Beine recht nützlich: Mit ihnen können Roboter Hindernissen gut ausweichen und Treppen steigen.
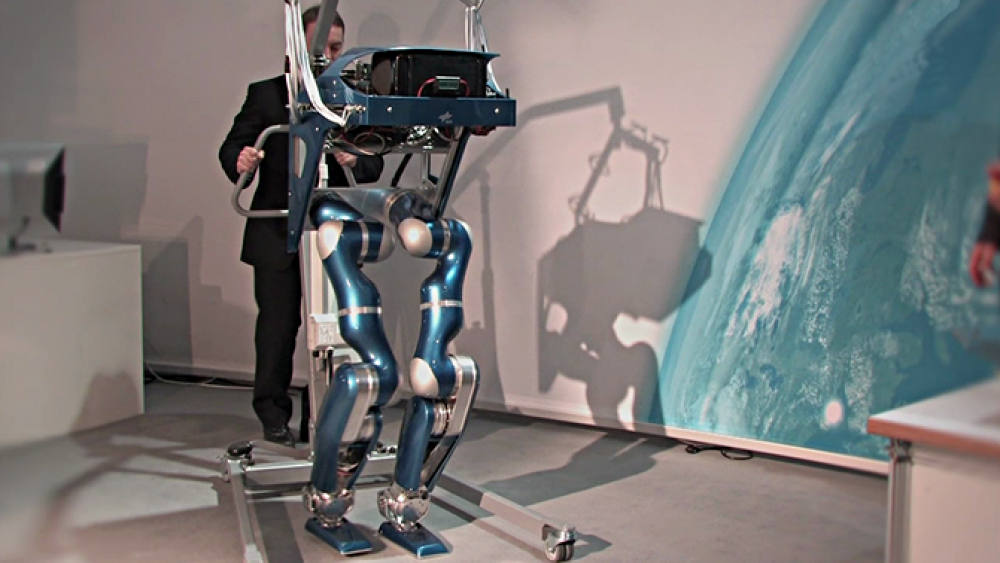
Der erste bekannte Zweibeiner war Asimo aus dem fernöstlichen Forschungslabors von Honda. Inzwischen sind Entwicklungen von lauffähigen Robotern ein Trendthema der Robotik, das an vielen Instituten vorangetrieben wird. Das Deutsche Zentrum für Luft- und Raumfahrt arbeitet am Konzept der sogenannten Soft Robotic. In jedem Gelenk kommen Drehmoment-Sensoren zum Einsatz, die nachgiebig geregelt sind. Der Forschungsschwerpunkt im Bereich Laufen liegt am DLR in robusten Gangalgorithmen, die auf unterschiedlichem Untergrund und auch bei externen Stößen und Krafteinwirkung trotz der Nachgiebigkeit der Maschine stabil bleiben.
Ein ganz anderer Typ ist RunBot, der dritte Roboter, den HYPERAUM.TV in dieser Reportage über laufende Robots vorstellt. Der Superläufer kommt aus dem Bernstein Center for Computational Neuroscience in Göttingen. Seine maximale Lauf-Geschwindigkeit beträgt 0,8 Meter pro Sekunde. Er ist damit der schnellste Roboter. Zuerst einmal ist der mechanische Apparat auf die Läufer-Aufgabe zugeschnitten. Seine kleinen Füße sind gebogen, er hat niedriges Gewicht, die Verteilung des Schwerpunktes ist optimiert. Aber noch bedeutsamer ist: Er arbeitet mit einem neuronalen Controller, der ähnlich dem menschlichen Rückenmark und anders als ein Digitalrechner funktioniert. So bildet RunBot Reflexe nach, wie wir sie von tierischen oder menschlichen Bewegungen kennen.
p>
© mce mediacomeurope GmbH 2010
